Overview
About eCognition Suite
Trimble® eCognition® Suite is an advanced analysis software available for geospatial applications. It is designed to improve, accelerate and automate the interpretation of a variety of geospatial data and enables users to design feature extraction or change detection solutions to transform geospatial data into geo-information.
eCognition imports a variety of geospatial data, fusing them together into a rich stack of geo-data for the analysis. The analysis logic is structured into a series of steps to create a computer-based representation of an expert’s geospatial interpretation process, a so called Rule Set. eCognition then combines the analysis logic with scalable computing power to identify changes over time or features on the earth’s surface across very large sets of data.
This eCognition Suite 10.5 is a major release and includes a range of new features and bug fixes. We recommend upgrading to this new version to benefit from the new features and improvements. For an overview of the highlights and a complete list of new features and bug fixes please refer to the following chapters.
Key Features
Building Analysis Solutions
The eCognition technology examines image pixels not in isolation, but in context. It builds up a picture iteratively, recognizing groups of pixels as objects. Just like the human mind, it uses color, shape, texture, shape and size of objects, as well as their context and relationships, to draw the same conclusions that an experienced analyst would draw.
To build an analysis solution, it is possible to flexibly combine the image interpretation steps like object creation (segmentation), object classification (knowledge based, fuzzy logic, machine learning), object detection (template matching) and object modification (fusing, smoothing, orthogonalization, simplification) into a Rule Set or even a new application (Rule Set with UI) to solve the analysis problem.
The result is a unique approach to translate mind models (why a human interpreter can see the objects, changes, or features in the geospatial data) into computer understandable code (Rule Set) or an individual/customized application.
Leveraging Data Synergies
eCognition can fuse a variety of geospatial data, such as spectral image data, 3D structure data from point clouds and spatial/thematic data from GIS vectors.
The proximity of eCognition to GIS, its ability to link and fuse the available data in an analysis - combined with the straightforward export of results to GIS layers - help eCognition users to achieve outstanding results.
Efficient Workflows
The eCognition Suite offers three different components which can be used stand-alone or in combination to solve even the most challenging fully automated and semi-automated production tasks:
- eCognition Developer is the development environment for object-based image analysis. It is used in the geospatial industry to develop Rule Sets or applications for eCognition Architect for the automatic analysis of geospatial data.
- eCognition Architect enables non-technical professionals such as vegetation mapping experts, urban planners or foresters to leverage eCognition technology. Users can easily configure, calibrate and execute analysis applications (Rule Set in combination with a UI) created in eCognition Developer.
- eCognition Server software provides a powerful processing environment for batch and parallel execution of analysis jobs, based on Rule Sets or applications.
eCognition Suite 10.5 Highlights
New segmentation algorithm based on based on META AI's open-source Segment Anything Model (SAM)
With the previous release, we published a blogpost explaining how to utilize the Segment Anything model in eCognition. In this release, we are introducing a new algorithm for segmentation of image data based on SAM. The algorithm offers three input modes for segmentation:
-
Everything Here the input is simply the image data. This is the simplest option that will segment any images based on automatically created seeds. The algorithm will create a segmentation grid for the image and will look for distinctive features. While this is the easiest way to apply SAM segmentation, it might not be suitable for large satellite imagery or large orthomosaic with many small features since the segmentation grid might be too coarse.
-
Bounding boxes This option is great for the users who have an object detection model that generates bounding boxes for each instance of any object of their interest, but they need semantic segmentation as their final deliverable. Users can apply the object detection model followed by SAM segmentation to obtain accurate outlines of each object. The input for this mode is a polygon or a line vector.
-
Points With this mode a user will be able to input a point vector for the segmentation. The algorithm uses these points to generate a segmentation mask that outlines the object of interest. The points help the algorithm understand which parts of the image are relevant and which are not.
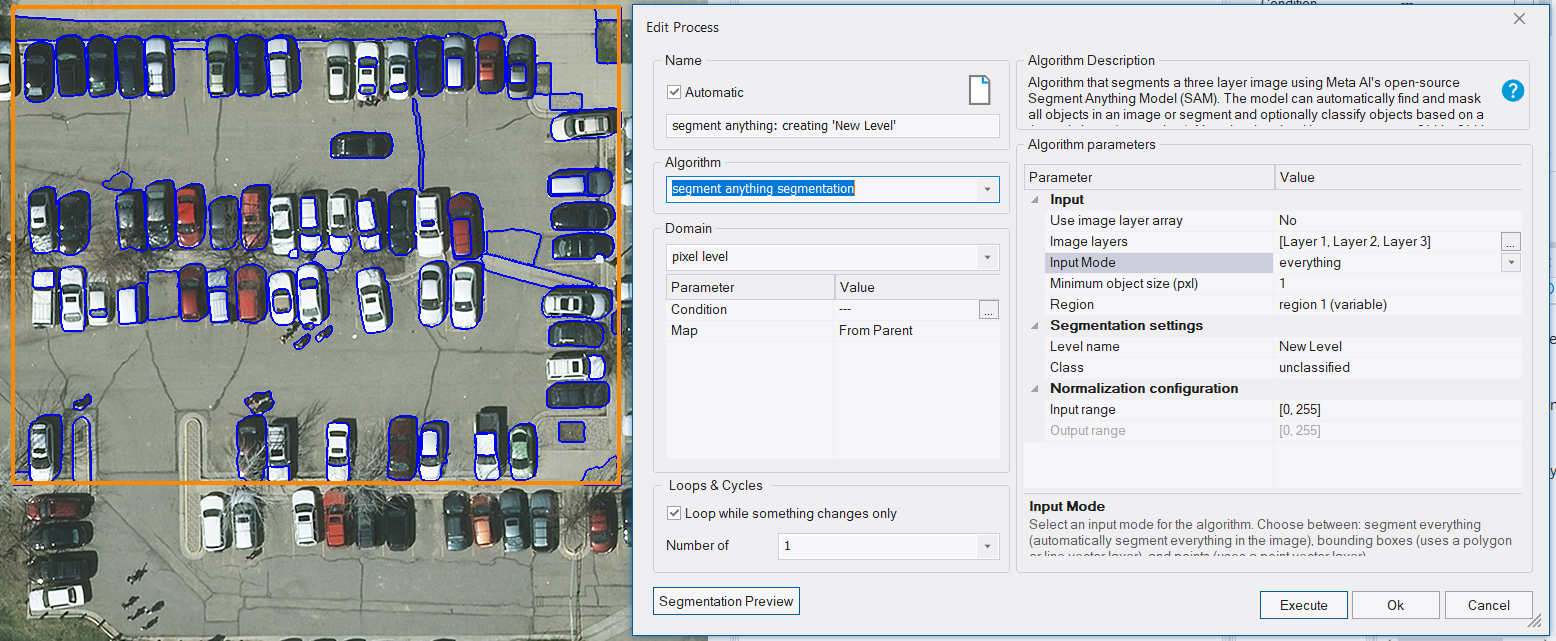
SAM Mode everything applied to region
see Reference Book > Algorithms and Processes > Segmentation Algorithms > Segment Anything Segmentation > Segment Anything Segmentation
DBSCAN algorithm
Point cloud classification is a great way to segment 3D data. However, many times a user needs an inventory of objects. This includes a location of each object or object count. For example a location and number of trees in a point cloud. Automated classification available in eCognition allows users to classify objects, but how do I find each instance of the object and identify its location?
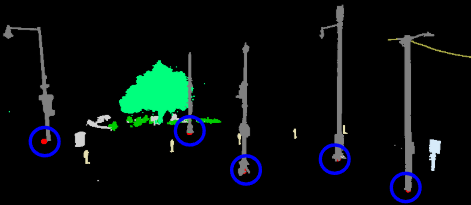
DBSCAN - Point created for each cluster
for point cloud class 'Poles'
DBSCAN is a clustering algorithm that allows to group points that are close to each other into one instance of an object. A user can input any point cloud class that defines an object of interest and the DBSCAN algorithm will be able to identify each individual instance of this object in the input point cloud class and create a point at the center location of it.
see Reference Book > Algorithms and Processes > Point Cloud Algorithms > Point cloud clustering (DBSCAN)
Enabling utilization of various Machine Learning Frameworks with ONNX models
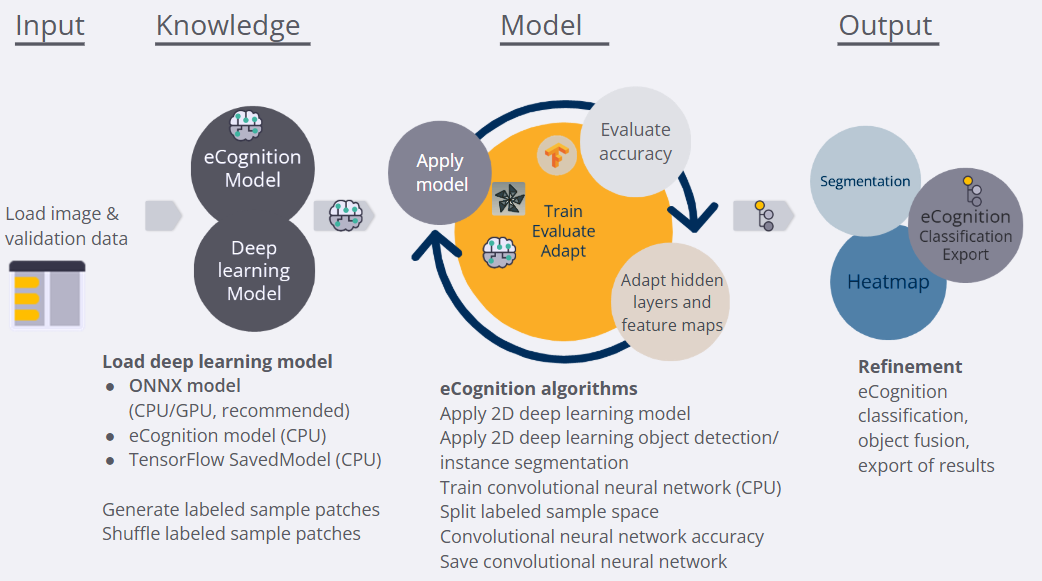
Deep learning and ONNX Model Support
Please note that eCognition and TensorFlow models are no longer supported on GPU. We recommend using ONNX models for new rulesets.
In previous releases, we enabled the usage of AI models trained outside of eCognition with one limitation, it had to be a TensorFlow model. The rapidly expanding AI community offers pre-trained models that were trained in other machine learning frameworks and obviously a ruleset developer does not want to be limited to TensorFlow. In this release of eCognition, we are introducing the support of ONNX models. ONNX models are machine learning models saved in the Open Neural Network Exchange (ONNX) format. ONNX format enables users to import and run models trained in different machine learning frameworks including TensorFlow, PyTorch without having to retrain them specifically for a certain platform where the model will be deployed.
see Reference Book > Algorithms and Processes > Deep Learning (CNN) Algorithms > Load 2D deep learning model
Toolbar for point cloud editing
Point clouds are playing an increasingly important role in geospatial applications. Geospatial professionals adopt new ways of data collection such as static and mobile scanning, aerial lidar, photogrammetry to acquire point clouds and leverage 3D data. eCognition offers algorithms that allow manipulation of point clouds, including automated classification.
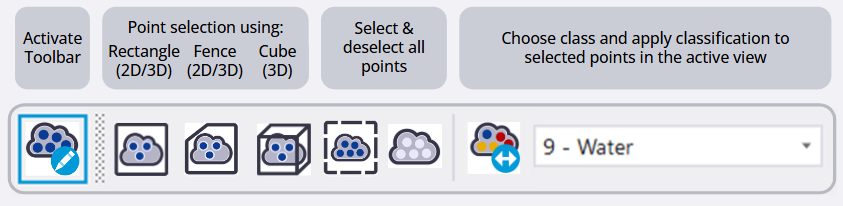
Point Cloud Editing Toolbar
In this release, we are adding manual editing capabilities with the new toolbar that allows various modes for point selection, reclassification of points in both 2D and 3D View. The toolbar will be automatically opened once the point cloud data is imported in eCognition.
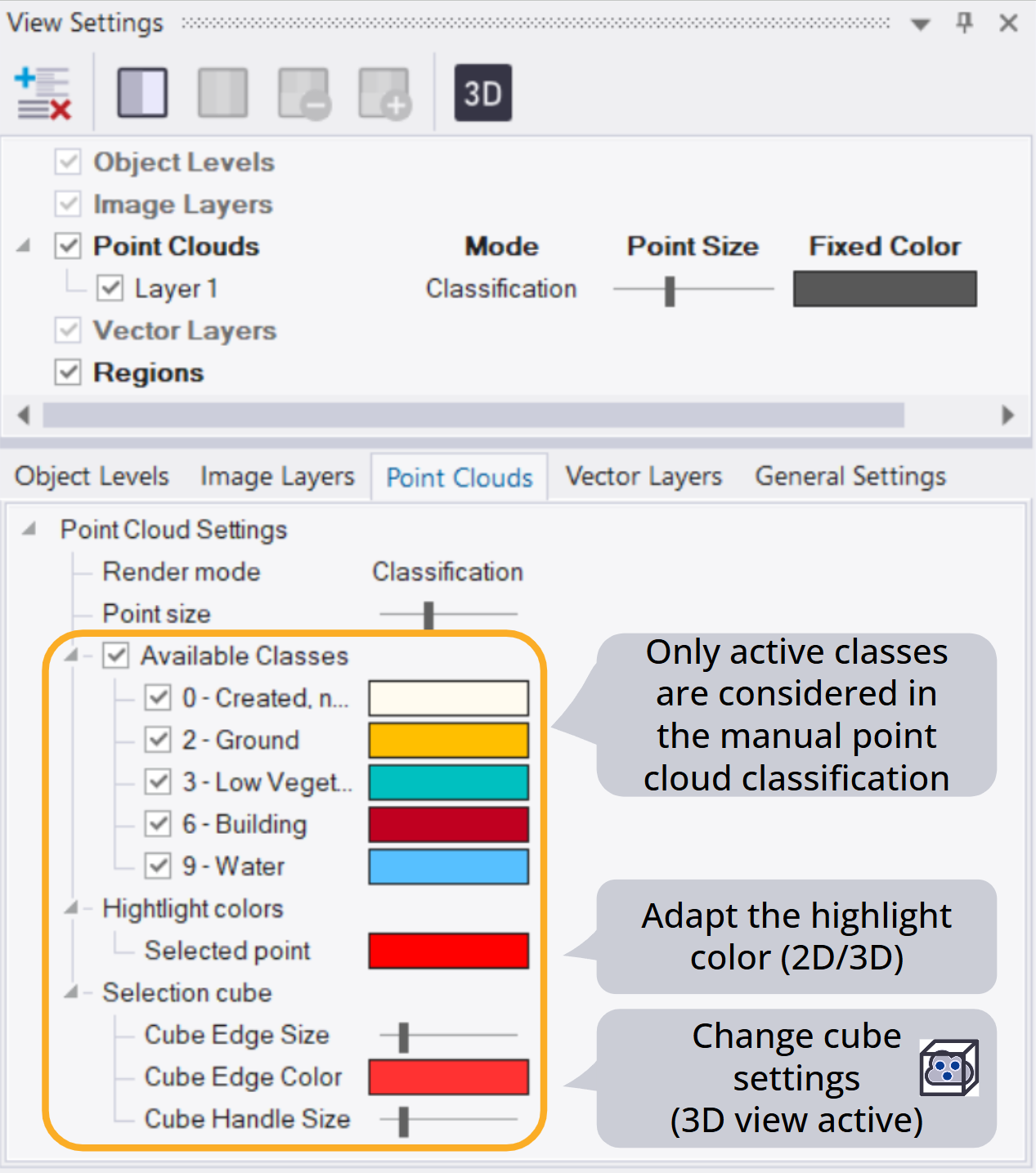
Point Cloud Classification Options
see User Guide > Starting eCognition Developer > Navigating in 3D > Starting eCognition Developer
